Abstract
A vital part of the publication process of ancient cuneiform tablets is creating hand-copies, which are 2D line art representations of
the 3D cuneiform clay tablets, created manually by scholars. This research provides an innovative method using Convolutional Neural
Networks (CNNs) to identify strokes, the constituent parts of cuneiform characters, and display them as vectors — semi-automatically
creating cuneiform hand-copies. This is a major step in optical character recognition (OCR) for cuneiform texts, which would contribute
significantly to their digitization and create efficient tools for dealing with the unique challenges of Mesopotamian cultural heritage.
Our research has resulted in the successful identification of horizontal strokes in 2D images of cuneiform tablets, some of them from
very different periods, separated by hundreds of years from each other. With the Detecto algorithm, we achieved an F-measure of 81.7%
and an accuracy of 90.5%. The data and code of the project are available on GitHub.
1 Introduction
1.1 Cuneiform Texts and Artificial Intelligence
Cuneiform is one of the earliest attested writing systems, and for thousands of years cuneiform has also been the dominant script
of the ancient Middle East, a region stretching roughly from the Persian Gulf to modern Turkey's highlands, and south across the
Levant into Egypt. Cuneiform texts appeared from the end of the fourth millennium BCE until they fell out of use in the early
centuries CE. The script was used for writing a plethora of different documents: legal, administrative, and economic documents;
correspondence between private individuals, or high-officials and their kings; some of the oldest works of literature; royal
inscriptions describing the deeds of great kings; as well as lexical and scientific compendia, some of which form the basis of the
Greco-Roman sciences the Western world is built upon today. Hundreds of thousands of cuneiform documents have been discovered since
excavations began in the 1850s. Recent estimates indicate the cuneiform text corpus is second in size only to that of ancient Greek
[
Streck 2010].
The rising application of artificial intelligence to various tasks provides a prime opportunity for training object detection
models to assist the digital publication of cuneiform texts on a large scale. This will help set up a framework for cultural
heritage efforts of preservation and knowledge dissemination that can support the small group of specialists in the field.
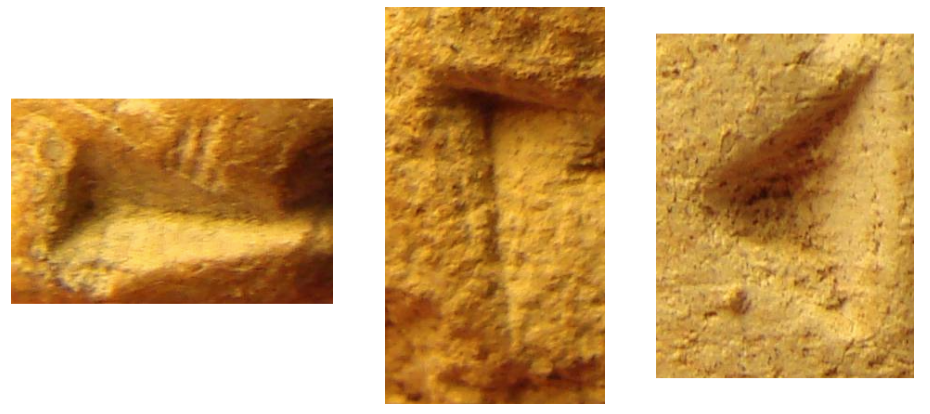
Cuneiform provides unique challenges for object detection algorithms, particularly OCR methods. Cuneiform tablets, on which the
texts were written, are 3D objects: pieces of clay which were shaped to particular sizes. While the clay was still moist, scribes
used styli with triangular edges to create impressions on the clay in three possible directions: horizontal, vertical, or oblique
(also
Winkelhaken; see Figure 1). “Diagonal” strokes are also found in the literature, but these are technically
either another type of horizontal or an elongated oblique impression [
Cammarosano 2014]
[
Cammarosano et al. 2014] [
Bramanti 2015]. Each of these impressions is called a stroke (or wedge, due
to their shape). Combinations of different strokes create characters, usually referred to as signs [
Taylor 2015].
Cuneiform can be more easily read when there is direct light on the tablet, especially from a specific angle that casts shadows on
the different strokes.
From the inception of research in cuneiform studies, tablets were difficult to represent in a modern 2D publishing format. Two
solutions were found:
- When possible, 2D images of cuneiform tablets were taken. However, for most of the field's history, such images were
extremely costly to produce and print, and they were often not in sufficient quality for easy sign identification (for
the history of early photography and cuneiform studies, see [Brusius 2015]).
- The second solution was creating hand-copies, 2D black and white line art made by scholars of the tablets' strokes. This
was the most popular solution. The disadvantage of this method is that it adds a layer of subjectivity, based on what the
scholar has seen and on their steady drawing hand. Nowadays these hand-copies are still in use, often drawn using vectors
in special programs (the most popular being the open source vector graphics editor
Inkscape).
In recent years, the quality of 2D images has risen significantly, while the costs of production and reproduction dropped. A
constantly growing number of images of cuneiform tablets are currently available in various online databases. The largest
repositories are the
British Museum, the
Louvre Museum, the
Cuneiform
Digital Library Initiative, the
Electronic Babylonian Library, and the
Yale Babylonian Collection. 2D+ and 3D models of cuneiform tablets have
also become a possibility, although these are still more expensive and labour-intensive to produce [
Earl et al. 2011]
[
Hameeuw and Willems 2011] [
Collins et al. 2019]; cf. overview in [
Dahl, Hameeuw, and Wagensonner 2019].
Previous research of identifying cuneiform signs or strokes have used mostly 3D models. Two research groups have developed programs
for manipulating 3D models of cuneiform tablets: the
CuneiformAnalyser [
Fisseler et al. 2013]
[
Rothacker et al. 2015] and
GigaMesh [
Mara et al. 2010].
Each group developed stroke extraction through geometrical features identification, while one team also used the 3D models
for joining broken tablet fragments [
Fisseler et al. 2014]. In addition, the GigaMesh team extracted strokes as
Scalable Vector Graphic (SVG) images [
Mara and Krömker 2013], which practically means creating hand-copies automatically
as vector images. This was used as a basis for querying stroke configurations when looking for different examples of the same sign,
using graph similarity methods [
Bogacz, Gertz, and Mara 2015a] [
Bogacz, Gertz, and Mara 2015b]
[
Bogacz, Howe, and Mara 2016] [
Bogacz and Mara 2018] [
Kriege et al. 2018].
Work on hand-copies includes transforming raster images of hand-copies into vector images (SVG) [
Massa et al. 2016].
Hand-copies and 2D projections of 3D models were used for querying signs by example using CNNs with data augmentation
[
Rusakov et al. 2019]. Previous work on 2D images has only recently started. Dencker et al. used 2D images for
training a weakly supervised machine learning model in the task of sign detection in a given image
[
Dencker et al. 2020]. Rusakov et al. used 2D images of cuneiform tablets for querying cuneiform signs by
example and by schematic expressions representing the stroke combinations [
Rusakov et al. 2020]. A more comprehensive
survey of computational methods in use for visual cuneiform research can be found in [
Bogacz and Mara 2022].
As there are no published attempts to extract strokes directly from 2D images of cuneiform tablets, the purpose of this paper is a
proof of concept to show it is possible to extract and vectorize strokes from 2D images of cuneiform using machine learning methods.
The quantity and quality of 2D images is improving, and for the most part they provide a more accurate representation of the tablet
than hand-copies, as well as being cheaper and quicker to produce in comparison to 3D models. Furthermore, since there are only
three basic types of strokes, but hundreds of signs and variants, one can label a significantly smaller number of tablets to attain
a sufficient number of strokes for training machine learning models. The resulting model will be able to recognize strokes in
cuneiform signs from very different periods, separated by hundreds of years. This semi-automation of hand-copies will be a
significant step in the publication of cuneiform texts and knowledge distribution of the history and culture of the ancient Near
East. Our data and code are available on GitHub.
[1]
1.2 Object Detection
Identifying cuneiform signs or strokes in an image is considered an object detection task in computer vision. Object detection
involves the automatic identification and localization of multiple objects within an image or a video frame. Unlike simpler tasks
such as image classification, where the goal is to assign a single label to an entire image, object detection aims to provide more
detailed information by detecting and delineating the boundaries of individual objects present. Object detection algorithms work by
analysing the contents of an image and searching for specific patterns or features that are associated with the object. These
patterns or features can include things like color, texture, shape, and size.
There are different types of computational models for object detection, ranging from the purely mathematical to deep learning
models [
Wevers and Smits 2019].
Mathematical models often involve traditional computer vision techniques that
rely on well-defined algorithms and handcrafted features. These methods typically follow a series of steps to detect objects in an
image. First is extracting relevant features from the image (edges, corners, textures, or color information), where the algorithms
are usually adapted based on domain knowledge. Then mathematical operations are performed to determine the location and extent of
potential objects based on the identified features. Further methods can be used in post-processing to refine the results.
Computational methods work best in ideal or near-ideal conditions, meaning there needs to be standardization in the types of cameras
used for taking the images, the lighting situation, and the background. The objects themselves should also be as uniform as possible
in size, shape, and color. This means that in complex and diverse real-world scenarios, mathematical models are often insufficient
for satisfactory results.
Deep learning models, particularly convolutional neural networks (CNNs), have revolutionized object detection
[
Girshick et al. 2014]. Instead of manual feature engineering used by mathematical models, deep learning methods can
automatically detect relevant features and objects. The models are trained on labelled data: a set of images where the objects of
interest have been marked, usually in rectangular bounding boxes, by humans. After training, the models can be tested and used on
unseen images that were not in the labelled training dataset to detect the same type of objects. Their biggest advantage is that they
can handle a wide range of object shapes, sizes, and orientations, making them adaptable to diverse scenarios, and generalize well
across different datasets. The disadvantages of such models are that they require large amounts of labelled data for effective
training; they are more computationally intensive compared to traditional mathematical models, requiring more computational power
outside the scope of the average computer; and they are black boxes, meaning it is not always possible to explain why the model makes
a certain prediction or not.
In a previous research project, we combined the use of mathematical and deep learning object detection methods for wildlife mapping
[
Pavlíček 2018]. However, for this project, mathematical models proved insufficient for the complexity and
variability of images of cuneiform tablets, which include different tablet shapes, colors, broken sections, etc. Therefore, in
this article we present our results on stroke recognition for 2D images of cuneiform tablets using several deep learning models, and
compare their advantages and disadvantages for this type of object detection on ancient and complex writing systems.
1.2.1 Convolutional Neural Networks
Convolutional neural networks (CNNs) are multilayer networks, specifically designed for processing and analyzing visual data.
The convolutional layers in the network process the input image through different filters that help the network detect features
of interest like edges, corners, textures, etc. The additional layers process the resulting feature maps to detect relevant
combinations of features. There can be several iterations of convolutional layers, depending on the specific architecture of
the neural network used.
There are two main types of convolutional neural networks: two-stage detectors and single-stage detectors
[
Jiao et al. 2019]. Two-stage detectors, like Faster R-CNN (Region-based Convolutional Neural Network), first
identify regions of the image that might contain objects before analyzing those regions more closely to detect objects
[
Girshick et al. 2014]. Single-stage detectors, like YOLO (You Only Look Once;
[
Redmon et al. 2016]), can detect objects directly without first identifying regions of interest. In what
follows, we provide a brief overview of the advantages and disadvantages of both methods. See also [
Mishra 2022].
1.2.1.1 YOLO
YOLO, short for You Only Look Once, is a family of convolutional neural network architectures that was first introduced
in 2015 by Joseph Redmon et al [
Redmon et al. 2016]. The version used in this paper, YOLOv5, was published in 2020
[
Jocher et al. 2020]. The YOLOv5 architecture consists of 232 layers
[2], multiple
convolutional layers that extract features from the image at different scales, and a series of prediction layers, which
output the object detection results.
The algorithm divides the input image into a grid of cells, with each cell responsible for predicting the presence of
one or more objects. For each cell, the network predicts the confidence score, which reflects the likelihood that an
object is present, and the bounding box coordinates that describe the location and size of the object.
The YOLOv5 algorithm has achieved state-of-the-art performance on several benchmark datasets. Its main advantage has
been speed: YOLO performs significantly faster than other CNN models. It has become a popular choice for a wide range of
applications in computer vision, including object detection in real-time video streams, autonomous driving, and
surveillance systems. The latest version at the time of publication is YOLOv8.
[3]
1.2.1.2 R-CNN, Fast R-CNN, and Faster R-CNN
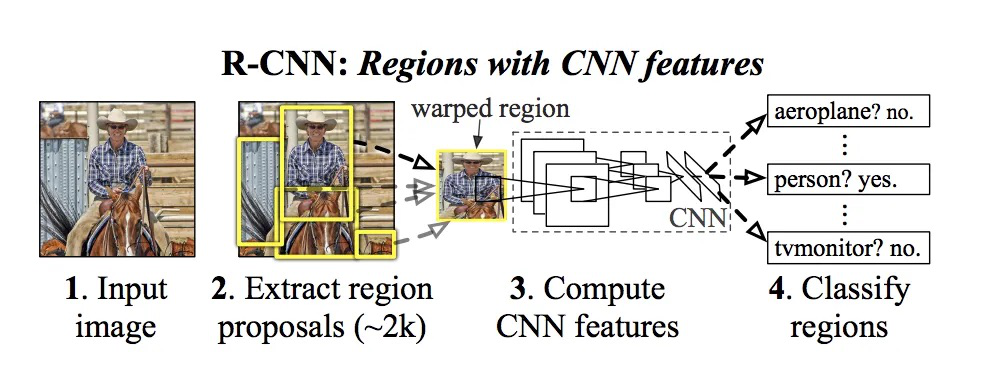
Region-based Convolutional Neural Networks (R-CNN) were first introduced in 2014 by Ross Girshick et al
[
Girshick et al. 2014]. This type of detector has four key components: (1) it generates region proposals that
suggest potential object locations in an image using a selective search method; (2) it extracts fixed-length feature vectors
from each of these proposed regions; (3) for each region of interest, it computes relevant features for object
identification; and (4) based on the extracted CNN features, the regions of interest are classified (see Figure 2).
A year later, Girshick proposed a more efficient version called Fast R-CNN [
Girshick 2015]. In
contrast to R-CNN, which processes individual region suggestions separately through the CNN, Fast R-CNN computes features
for the entire input image at once. This significantly speeds up the process and allows for better use of storage space
for feature storage.
Building on the improvements of Fast R-CNN, Faster R-CNN was introduced just three months later
[
Ren et al. 2015]. It introduced the region proposal network (RPN), which generates regions of interest
(RoI), potential identifications of the desired objects. It does so by sliding a small window (known as an anchor) over
the feature maps and predicting whether the anchor contains an object or not. For this project, we used a combination of
Faster R-CNN and ResNet-50, a deep learning architecture that optimizes the network's performance. This model was
implemented by Bi in Detecto python library, using the PyTorch python framework.
[4]
2 Dataset and Evaluations
2.1 Dataset
2.1.1. Dataset Creation, Division, and Augmentation
The Assyriologists on our team tagged thousands of horizontal strokes in eight tablets from the Yale Babylonian
Collection (see Table 1), made available through the kind permission of Agnete W. Lassen and Klaus
Wagensonner. For the first stage of research, we labelled 7,355 horizontal strokes in the tablets chosen, divided into
823 images.
| Yale ID |
CDLI ID |
Material |
Period |
Genre |
Content |
Hand-Copy Publication |
| YPM BC 014442 |
P504832 |
Clay |
Neo-Assyrian (ca. 911-612 BCE) |
Literary |
Enuma Eliš ll. 1-16, 143-61 |
CT 13 1,3 |
| YPM BC 023856 |
P293426 |
Clay |
Old-Babylonian (ca. 1900-1600 BCE) |
Literary |
Gilgamesh and Huwawa ll. 1-36 |
JCS 1 22-23 |
| YPM BC 002575 |
P297024 |
Clay |
Neo/Late-Babylonian (ca. 626-63 BCE) |
Commentary |
Iqqur īpuš i 36, ii 31, iii 22, iv 5, v 13 |
BRM 4 24 |
| YPM BC 016773 |
P293444 |
Limestone |
Early Old-Babylonian (ca. 2000-1900 BCE) |
Inscription |
Building inscription of Anam, No. 4 |
YOS 1 36 |
| YPM BC 016780 |
P293445 |
Limestone |
Early Old-Babylonian (ca. 2000-1900 BCE) |
Inscription |
Building inscription of Anam, No. 2 |
YOS 1 35 |
| YPM BC 016869 |
P429204 |
Clay |
Middle Assyrian (ca. 1400-1000 BCE) |
Inscription |
Inscription of Aššur-nadin-apli |
YOS 9 71 |
| YPM BC 021204 |
P308129 |
Clay |
Middle Assyrian? (ca. 1400-1000 BCE) |
Medical Text |
|
FS Sachs 18, no. 16 |
| YPM BC 021234 |
P308150 |
Clay |
Old-Babylonian (ca. 1900-1600 BCE) |
Hymn |
Hymn to Inanna-nin-me-šar2-ra, ll. 52-102 |
YNER 3 6-7 |
To train an artificial neural network, a dataset divided into training, validation, and test subsets needs to be created. In
order to increase the number of images in the dataset, several augmentation methods were used. The recommended number of images
for each class is at least a thousand images [
Cho et al. 2016]. Roboflow
[5] is a web application used to create extended
datasets from manually labelled data using labelling tools such as LabelImg.
[6]
For pre-processing, the images were divided into equal squares of 416 x 416 pixels (for Detecto and YOLOv5). For R-CNN, the
size of images was downsized to 224 x 224 pixels. For the final version of the model, the images were augmented using Roboflow.
The final dataset contains 1,975 images with more than 20,000 labels. The augmented horizontal stroke dataset is available
online.
[7]
2.1.2 Labelling Criteria
For machine learning purposes, the images of the cuneiform tablets needed to be split into squares of equal size (see Appendix).
Labelling was performed after splitting the images. This meant the loss of a lot of the context necessary to identify strokes
with certainty. We used tablet images with existing hand-copies, which were used as a guide and previous interpretations of the
tablets.
However, a greater emphasis was given to what is currently visible on the image than what appears in the hand-copy. The
hand-copies were not always true to what is seen on the images for three main reasons: (1) the hand-copy preserves signs which
were visible on the tablet at the moment of their creation, but by the time the image was taken, they had eroded; (2) the
camera angle when taking the image did not capture all the detail the tablet contains. This is a common scenario, since signs
at the edges of the tablet will not be seen as clearly when taking a frontal image; and (3) strokes may have been cut off where
the image was split.
If a stroke was completely unrecognizable as a horizontal stroke on the image at hand, because of either of the aforementioned
restrictions, it was not labelled. If enough of the characteristic features of the stroke (particularly its triangular head)
were present on the image, it was labelled. Being able to identify partially broken strokes is still useful for real-life
scenarios, since the tablets themselves are often broken, a common problem in sign identification.
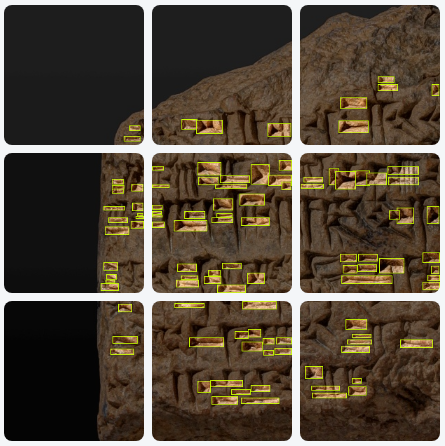
Additionally, strokes which are usually considered diagonal were also labelled. A relative leniency was given to this issue,
since in general, the lines on cuneiform tablets are not always straight (i.e., creating a 90° angle with the tablet itself).
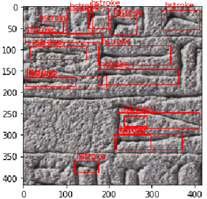
Therefore, a horizontal stroke that may be exactly horizontal when viewed in its line will appear diagonal on the image if the
lines themselves are somewhat diagonal. For an example of labelled images, see Figure 3.
2.2 Evaluation Metrics
Standard evaluation metrics include precision, sensitivity, and F-measure, calculated from true positive rate (TP), false positive
rate (FP), and false negative rate (FN). These are displayed in Table 2. From these, the following metrics can be calculated to
quantitatively assess the efficacy of the model.
|
Predicted Positive |
Predicted Negative |
| Actual Positive |
True Positive (TP) |
False Negative (FN) |
| Actual Negative |
False Positive (FP) |
True Negative (TN) |
Table 2.
“TP” refers to the the proportion of cases that are correctly identified as positive by the model. “FP” marks the
proportion of cases that are incorrectly classified as positive by the model. “FN” reflects the proportion of cases that are
incorrectly identified as negative by the model. “TN” indicates the proportion of cases that are correctly identified as
negative.
Accuracy or Precision (p): Precision measures how many of the total number of predicted positive cases are true positives. In other
words, it is the ratio of true positives to the total number of predicted positive cases, whether true or false.
$$p = \frac{TP}{TP+FP}$$
Sensitivity or Recall (s): Sensitivity measures how many of the true positive cases are correctly identified as positive by the
model. In other words, it is the ratio of true positives to the total number of positive cases, which includes both true positives and
false negatives.
$$s = \frac{TP}{TP+FN}$$
F-measure (F1): The F1 measure combines precision and sensitivity into a single score that is commonly used as the final
assessment of a model. It is the harmonic mean of precision and sensitivity, calculated as two times the product of precision and
sensitivity divided by their sum, resulting in a number between 0 and 1 that can be viewed as a percentage of overall
accuracy.
$$F = \frac{2×p×s}{p+s}$$
3 Results
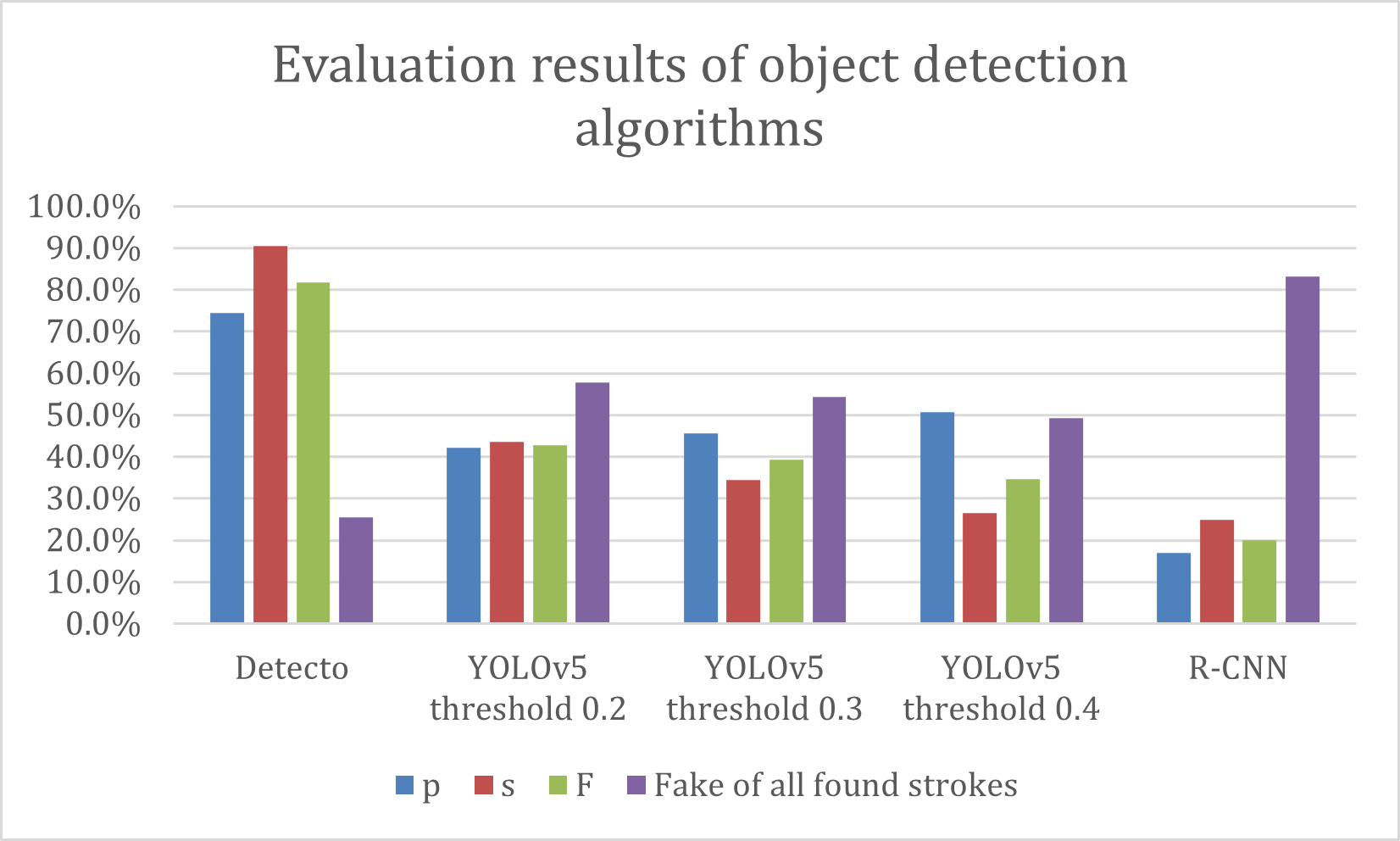
Our goal was to test several types of object detectors to compare which one gives the best results for our task. According to
theoretical comparisons on public datasets, one-stage algorithms (here YOLOv5) should give faster but less accurate results compared to
two-stage detectors (here Detecto and R-CNN).
While testing with the YOLOv5 detector took only 1.189 seconds, the overall accuracy was just over 40%, which is not sufficient for
practical usability. The prediction using the R-CNN network took on average 45 seconds, but the results did not even reach the
YOLOv5 level. We believe that this was due to a lack of tuning of the hyperparameters and may be the subject of further experiments.
Detecto, which was not as fast as YOLOv5 but not as slow as R-CNN, achieved results that far outperformed both previous algorithms with
its 90.5% sensitivity and 81.7% F-score. The reason behind this fact may be that Detecto is an optimised network that combines the
principles of a two-stage detector with ResNet. Detailed evaluation results are shown in Table 3, Figure 4, and Table 4.
| Name |
TP |
FN |
FP |
p |
s |
F1 |
Fake of All Found Strokes |
| Detecto (Threshold 0.4) |
669 |
70 |
229 |
74.4% |
90.5% |
81.7% |
25.5% |
| YOLOv5 (Threshold 0.2) |
323 |
419 |
444 |
42.1% |
43.5% |
42.8% |
57.8% |
| YOLOv5 (Threshold 0.3) |
256 |
486 |
305 |
45.6% |
34.5% |
39.2% |
54.4% |
| YOLOv5 (Threshold 0.4) |
196 |
546 |
190 |
50.7% |
26.4% |
34.7% |
49.2% |
| R-CNN (Threshold 0.4) |
191 |
595 |
941 |
16.9% |
24.8% |
19.9% |
83.1% |
Table 3.
Evaluation results.
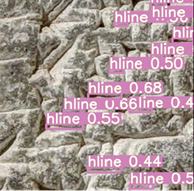
| Prediction |
Network |
Tablet |
 |
Detecto |
YPM BC 016773 |
 |
YOLOv5 |
YPM BC 018686 |
 |
R-CNN |
YPM BC 023856 |
Table 4.
Prediction with respective detectors.
4 Discussion
The results of the machine learning model we developed (90.5% accuracy and 81.7% F-measure on Detecto) are very promising, particularly
considering the relatively small amount of labelled data. It shows that this previously untested approach, namely stroke identification
from 2D images, can be highly efficient for the vectorization of cuneiform tablets. While stroke identification has already been
achieved in 3D models of cuneiform-bearing objects (see Section 1.1), our approach shows the same is possible for 2D images which are far
cheaper to produce.
Furthermore, our model is not period-dependent, meaning that some of the tablets we have chosen are over a thousand years apart (see
Table 1). But since the writing technique itself has not changed during that period, there were no significant differences in the
model's ability to recognize the strokes. The major attested difference between stroke types in Mesopotamia is Babylonian vs. Assyrian
strokes, the former having longer bodies (the tracing line), and the latter having bigger heads (the central point of the impression
left on the clay tablet [
Edzard 1980] [
Labat 1988]. This, however, does not seem to affect our model.
Since it was possible to effectively identify horizontal strokes, the same is possible for verticals and obliques. With this additional
ability, it will be possible to create a full vectorization of cuneiform tablets, which will need to be minimally corrected by an expert.
These vectorizations are in effect like hand-copies, which are a first step in assyriological research in interpreting cuneiform texts.
It will be the first step in a human-in-the-loop pipeline of cuneiform identification from image to digital text.
The subsequent step, identification of constellations of strokes as cuneiform signs, is under development by part of the authors
[
Gordin and Romach 2022], currently using traditional hand-copies as input (see
demo; see [
Yamauchi et al. 2018] for previous work in this
direction). Once the signs are identified with their equivalent in Unicode cuneiform [
Cohen et al. 2004], these can be
transliterated and segmented into words using the model Akkademia, previously developed by the assyriologists on our team and others
[
Gordin et al. 2020]. This can be further followed by machine translation for the two main languages which used the
cuneiform writing system, Sumerian and Akkadian. The Machine Translation and Automated Analysis of Cuneiform Languages (MTAAC) project
has begun developing models for translating Ur III administrative texts (dated to the 21st century BCE)
[
Punia et al. 2020]. Machine translation of Akkadian has also been achieved, focusing primarily on first millennium BCE
texts from a variety of genres, available through
ORACC [
Gutherz et al. 2023].
This pipeline can become a vital part of assyriological research by making accessible to experts and laypeople alike countless
cuneiform texts that have previously received less scholarly attention. However, it is important to note the limitations of this
pipeline for assyriological research.
The vector images we produce are not an accurate representation of the stroke, but rather a chosen schema. Although various schemas can
be selected, they are still one simplistic representation on how a stroke looks, which is then applied across the corpus. Therefore, for
purposes of scribal hand identification, as well as palaeography, they lack important aspects, such as ductus, or the
formation of individual signs, and aspect (cf. Latin equilibrium), or the visual impression created by the
set hand of a scribe (i.e., the style of writing). This is the same, however, for manually created hand-copies, since there are
limitations to how these 3D objects can be captured in 2D, and some scholars tend to simplify what they see on the tablet when creating
hand-copies.
In addition, our results worked well on very high quality 2D images, curated by an expert [
Wagensonner 2015]. Although
anyone can take high-quality images on their phone, ensuring that the signs and strokes are as legible as possible usually requires an
expert knowledge of the cuneiform script and the application of light sources. For this to efficiently work on a large scale, preferably
only high-quality 2D images of cuneiform artifacts should be used.
5 Towards Quantitative Epigraphy
The task of the epigrapher is to decipher the ancient writing surface — not merely to decipher the script or any linguistic element
on its own, but rather to produce a holistic decipherment of the inscription, its material aspects, and its contextual meaning.
Therefore, it is challenging to translate epigraphic tasks into one or more computational tasks. The current contribution is a step in
this direction, by attempting to gouge out the atomized elements of the script and its arrangement on the writing surface. This
diplomatic approach to texts has a long history in medieval scholarly practice [
Duranti 1998]
[
Bertrand 2010], and it is a
desideratum in order to piece together computational tasks for quantitative
epigraphy. It is further a way to bridge the differences across large numbers of ancient or little-known languages and scripts, since
much of the literature surrounding their study involves discussions on reconstructing the writing surface, traces, and their proper
sequence in their
Sitz im Leben.
The problem begins when one tries to harmonize tasks from the disciplines in the realm of computer science and the different research
questions in the humanities, which do not necessarily overlap. For an epigrapher, identifying and classifying an object in an image is
not the end goal, as it might be in computer science. Rather, it is a step in a process to reach historical understanding of a certain
genre of text, writing tradition, or historical period. Furthermore, the amounts of data that are available to train generative models
like ChatGPT or the many image generator applications made available in recent months, is beyond the scope of the digital data at the
hands of the average epigrapher, historian, or digital humanist.
For that end, an interdisciplinary group of scholars dealing with ancient language processing and machine learning for ancient languages
[
Anderson et al. 2023] [
Sommerschield et al. 2023] has set out to better define and standardize data
formats, tasks, and benchmarks. This initiative adds to the growing movement of computational and quantitative studies in classics,
biblical studies, ancient Near Eastern studies, and so on. The present paper is aimed to contribute to the standardization of the
epigrapher's computational tasks in ancient scripts. This paper also provides an example of harmony and collaboration between computer
scientists and humanists, as well as between computer science tasks and humanistic research questions.
Furthermore, the methodology and techniques used in this study can be applied to other writing systems beyond cuneiform. The
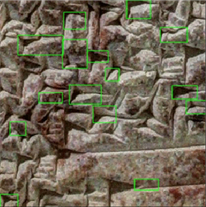
semi-automatic vectorization approach can be adapted to identify and extract specific features of other ancient scripts. In ancient
Chinese and Japanese for example, one can try to find the common denominator made up of strokes, the components of each character. In
classical Maya writing, one could focus on the anthropomorphic elements of signs, like noses, eyes, ears, etc. The same can be said for
other hieroglyphic scripts, like Egyptian or Anatolian hieroglyphs.
Appendix
6.1 Training Convolutional Neural Networks
In the following section, we present the parameters necessary to replicate our results.
For all the models we employed, image augmentation methods were necessary to increase the number of available images for training.
Grayscale augmentations were applied with three samples per augmentation:
- Saturation applied to 50% of the images
- Saturation between -20% and +20%
- Exposure between -20% and +20%
6.1.1 Detecto Training
For Detecto training, the dataset was divided into three subsets. The training set contains 3,456 images, the validation set
contains 330 images, and the testing set contains 164 images. The training was performed on Google Collaboratory, and the
layers from the fasterrcnn_resnet50_fpn_coco-258fb6c6.pth model were unfrozen and re-trained. Fifty epochs were run, with three
steps per epoch, and the validation loss dropped from 0.74 to 0.64 after all epochs, which took 302 minutes. After five epochs,
the validation loss did not decrease, so we could have used early stopping for this model.
6.1.2 YOLOv5 Training
The YOLOv5 architecture (with 232 layers) was trained in Google Colaboratory using CUDA on a Tesla T4 GPU with 40
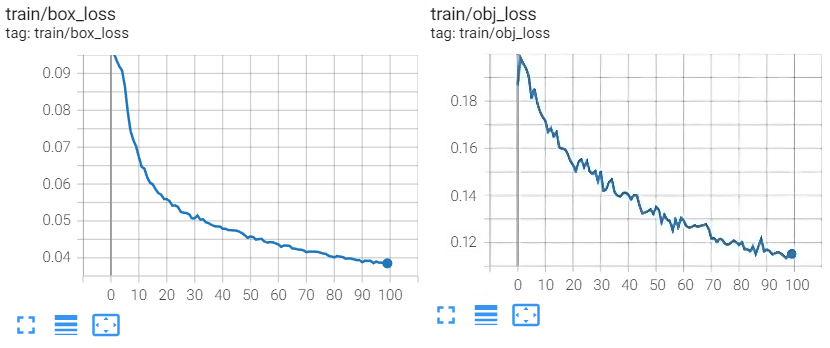
multiprocessors and 15,109 MB of total memory. 100 epochs were executed with a batch of 16 images. The training loss (MAE) was
reduced from 0.1 in the first epoch to 0.03 in the last epoch, as can be seen in Figure 5.
6.1.3 R-CNN Training
The whole implementation was done using the artificial intelligence lab at the Czech University of Life Sciences
in Prague, because R-CNN has high memory requirements and caused Google Collaboratory to crash (due to lack of memory). The
environment settings as seen in Table 5 were used:
| IDE |
VS Code with Jupyter Extension |
| Kernel |
Python 3.8.12 within Anaconda |
| AI Framework |
Tensorflow 2.7.0 for GPU |
| Nvidia Configuration |
NVIDIA Quadro P400, cuda 11.2, cudnn 8.1 |
Table 5.
R-CNN environment settings.
We have implemented region proposals with selective search using IoU (Intersection over Union) configured as seen in
Table 6:
| Max Samples |
55 (based on the maximum in training set) |
| Selective Search Iterate Results |
2000 (proposed in original paper) |
| IoU Object Limit |
0.7 |
| IoU Background Limit |
0.3 |
Table 6.
R-CNN configuration.
The images used were 224 x 224 in size. We chose a VGG model pre-trained on the ImageNet dataset (input layer, thirteen
convolutional layers, five MaxPooling layers, Flatten, Dense). After encoding the label set once and splitting it into
training (90%) and test sets (10%), we proceeded to train with the configurations as seen in Table 7. Early stopping caused
the training process to stop after thirty-nine epochs.
| Error Function |
Binary cross-entropy |
| Optimizer |
Adam |
| Learning Rate |
0.0001 |
| Training Epochs |
100 |
| Steps in Epoch |
10 |
| Patience Epochs for Early Stopping |
20 |
Table 7.
R-CNN training hyperparameters.
6.2 Utilities for Further Research
In order to ease the process of data creation for the next steps of the project, we developed three image and label processing
tools: an image splitter, a vector visualization, and an image merger. These tools are available in the GitHub repository of our
project.
[8]
The neural networks that we used for object detection accept square input, and if it is not square, the image is reshaped to a
standard input size. For large tablets, there would be a significant loss of data, so it is necessary to slice large images into
smaller, uniformly sized square images and train the network on these slices. We chose a fixed image size of 416 x 416 (a multiple
of eight, which is generally better for machine learning purposes [
Chollet and Pecinovský 2019]).
While for the research presented in this article, we split the images before labelling, this slowed down the labelling process.
Therefore, we developed an image splitter and an image merger. Our proposed system works as follows: after labelling, a large
image with a cuneiform-bearing object is cut into squares with 50% overlap, so there is no data loss if strokes are on the edge
of one square, since they are in the middle of the next one. Then the neural network predicts where the horizontal strokes are in
the image. The networks return bounding boxes which indicate the location of the strokes. These bounding boxes are replaced by
vectors of strokes in an empty image, and the strokes in the whole tablet are reconstructed using merging. In this way we can
create an automatic vectorization of horizontal (and other) strokes in the whole tablet (see Figure 6).
The main challenge in preparing the set of tools was dealing with splitting labels. When splitting the image into smaller squares,
there is a cut-off threshold for deciding whether the annotated strokes are still significant enough to be used in training. The
threshold is based on a percentage that determines what portion of the annotated strokes can be kept and what should be removed.
Acknowledgements
This research was funded by two grants. The project cuneiform analysis using Convolutional Neural Networks reg. no. 31/2021 was
financed from the OP RDE project Improvement in Quality of the Internal Grant Scheme at CZU, reg. no.
CZ.02.2.69/0.0/0.0/19_073/0016944. The project no. RA2000000010 was financed by the CULS – Ariel University cooperation grant.
Works Cited
Anderson et al. 2023 Anderson, A. et al. (eds) (2023) Proceedings of
the ancient language processing workshop (RANLP-ALP 2023). Shoumen, Bulgaria: INCOMA Ltd.
André-Salvini and Lombard 1997 André-Salvini, B. and Lombard, P. (1997)
“La découverte épigraphique de 1995 à Qal'at al-Bahrein: un jalon pour la chronologie de la phase Dilmoun Moyen
dans le Golfe arabe”, Proceedings of the seminar for Arabian studies, 1995. pp. 165–170.
Bertrand 2010 Bertrand, P. (2010)“Du De re diplomatica au Nouveau traité de
diplomatique: réception des textes fondamentaux d’une discipline”, in Leclant, J., Vauchez, A., and Hurel, D.O. (eds)
Dom Jean Mabillon, figure majeure de l'Europe des lettres: Actes des deux colloques du tricentenaire de la mort de
Dom Mabillon (abbaye de Solesmes, 18-19 mai 2007, pp. 605-619. Paris: Académie des Inscriptions et Belles-Lettres.
Bogacz and Mara 2018 Bogacz, B. and Mara, H. (2018) “Feature descriptors for
spotting 3D characters on triangular meshes”,
Proceedings of the 16th international conference on
frontiers in handwriting recognition, IEEE, 2018.Niagara Falls, NY, USA, 5-8 August. pp. 363-368. Available at:
https://ieeexplore.ieee.org/document/8583788
Bogacz and Mara 2022 Bogacz, B. and Mara, H. (2022) “Digital assyriology:
Advances in visual cuneiform analysis”,
Journal on Computing and Cultural Heritage, 15(2).
https://doi.org/10.1145/3491239.
Bogacz, Gertz, and Mara 2015a Bogacz, B., Gertz, M., and Mara, H. (2015a)
“Character retrieval of vectorized cuneiform script”,
Proceedings of the
13th international conference on document analysis and recognition, IEEE, 2015. Piscataway, NJ, 23-26 August. pp. 326-330.
https://doi.org/10.1109/ICDAR.2015.7333777
Bogacz, Gertz, and Mara 2015b Bogacz, B., Gertz, M., and Mara, H. (2015b)
“Cuneiform character similarity using graphic representations”, in Wohlhart, P. and Lepetit, V. (eds)
20th computer vision winter workshop. Graz, Austria: Verlag der Technischen Universität Graz, pp. 105–112.
Bogacz, Howe, and Mara 2016 Bogacz, B., Howe, N., and Mara, H. (2016)
“Segmentation free spotting of cuneiform using part structured models”,
Proceedings of
the 15th international conference on frontiers in handwriting recognition, IEEE, 2016. Shenzhen, China, 23-26 October. pp. 301-306.
https://doi.org/10.1109/ICFHR.2016.0064.
Brusius 2015 Brusius, M. (2015) Fotografie und Museales Wissen: William Henry Fox
Talbot, das Altertum und die Absenz der Fotografie. Berlin: De Gruyter.
Cammarosano 2014 Cammarosano, M. (2014) “The cuneiform stylus”,
Mesopotamia: Rivista di Archeologia, Epigrafia e Storia Orientale Antica, 69, pp. 53–90.
Cammarosano et al. 2014 Cammarosano, M. et al. (2014)
“Schriftmetrologie des Keils: Dreidimensionale Analyse von Keileindrücken und Handschriften”,
Die Welt des Orients, 44(1), pp. 2-36.
Cho et al. 2016 Cho, J. et al. (2016) “How much data is needed to train a
medical image deep learning system to achieve necessary high accuracy?”
arXiv, 1511.06348.
Available at:
http://arxiv.org/abs/1511.06348.
Chollet and Pecinovský 2019 Chollet, F. and Pecinovský, R. (2019) Deep
learning v Jazyku Python: Knihovny Keras, TensorFlow. Praha, Prague: Grada Publishing a.s.
Cohen et al. 2004 Cohen, J. et al. (2004) “iClay: Digitizing cuneiform”,
Proceedings of the 5th international symposium on virtual reality, archaeology and cultural heritage, EG,
2004. Oudenaarde, Belgium, 7-10 December. pp. 135-143. Available at:
https://doi.org/10.2312/VAST/VAST04/135-143.
Collins et al. 2019 Collins, T. et al. (2019) “Automated low-cost
photogrammetric acquisition of 3D models from small form-factor artefacts”,
Electronics, 8, p. 1441.
https://doi.org/10.3390/electronics8121441.
Dencker et al. 2020 Dencker, T. et al. (2020) “Deep learning of cuneiform sign
detection with weak supervision using transliteration alignment”,
PLOS ONE, 15(12), p. e0243039.
https://doi.org/10.1371/journal.pone.0243039.
Duranti 1998 Duranti, L. (1998) New uses for an old science. Chicago, IL:
Scarecrow Press.
Earl et al. 2011 Earl, G. et al. (2011) “Reflectance transformation imaging
systems for ancient documentary artefacts”, in Dunnand, S., Bowen, J.P., and Ng K.C. (eds)
EVA London 2011: Electronic visualisation and the arts, pp. 147-154. London: BCS.
Edzard 1980 Edzard, D.O. (1980) “Keilschrift”,
Reallexikon der Assyriologie, 5, pp. 544-568.
Fisseler et al. 2014 Fisseler, D. et al. (2014) “Extending philological
research with methods of 3D computer graphics applied to analysis of cultural heritage”,
Proceedings of the
eurographics workshop on graphics and cultural heritage, 2014. Darmstadt, Germany, 6-8 October, pp. 165-172.
https://doi.org/10.2312/gch.20141314.
Girshick 2015 Girshick, R. (2015) “Fast R-CNN”,
Proceedings of the IEEE international conference on computer vision, IEEE, 2015. Santiago, Chile,
11-18 December. pp. 1440-1448.
https://doi.org/10.1109/ICCV.2015.169.
Girshick et al. 2014 Girshick, R. et al. (2014) “Rich feature hierarchies for
accurate object detection and semantic segmentation”,
Proceedings of the IEEE conference on computer vision and
pattern recognition, IEEE, 2014. Columbus, OH, USA, 23-28 June.
https://doi.org/10.1109/CVPR.2014.81.
Gordin and Romach 2022 Gordin, S. and Romach, A. (2022) “Optical character
recognition for complex scripts: A case-study in cuneiform”,
Proceedings of the alliance of digital
humanities organizations conference, IDHC, 2022. Tokyo, Japan, 25-29 July. Available at:
https://dh-abstracts.library.cmu.edu/works/11708.
Hameeuw and Willems 2011 Hameeuw, H. and Willems, G. (2011) “New
visualization techniques for cuneiform texts and sealings”, Akkadica, 132(3), pp. 163-178.
Kriege et al. 2018 Kriege, N.M. et al. (2018) “Recognizing cuneiform signs
using graph based methods”,
Proceedings of the international workshop on cost-sensitive learning, PMLR,
2018. San Diego, CA, USA, 5 May. pp. 31-44. Available at:
https://proceedings.mlr.press/v88/kriege18a.html.
Labat 1988 Labat, R. and Malbran-Labat, F. (1988) Manuel d’épigraphie
akkadienne, 6th ed. Paris: Librairie Orientaliste Paul Geuthner.
Mara and Krömker 2013 Mara, H. and Krömker, S. (2013) “Vectorization of
3D-characters by integral invariant filtering of high-resolution triangular meshes”,
Proceedings of the
international conference on document analysis and recognition, IEEE, 2013. Washington, DC, USA, 25-28 August. pp. 62-66.
https://doi.org/10.1109/ICDAR.2013.21.
Mara et al. 2010 Mara, H. et al. “GigaMesh and Gilgamesh: 3D multiscale integral
invariant cuneiform character extraction”,
Proceedings of the 11th international symposium on virtual
reality, archaeology, and cultural heritage, EG, 2010. Paris, France, 21-24 September.
https://doi.org/10.2312/VAST/VAST10/131-138.
Massa et al. 2016 Massa, J. et al. (2016) “Cuneiform detection in vectorized
raster images”,
Proceedings of the 21st computer vision winter workshop, 2016. Rimske Toplice,
Slovenia, 3-5 February. Available at:
https://d-nb.info/1191851524/34.
Punia et al. 2020 Punia, R. et al. (2020) “Towards the first machine
translation system for Sumerian transliterations”,
Proceedings of the 28th international conference on
computational linguistics, ACL, 2020. Barcelona, Spain, 13-18 September. pp. 3454-3460.
https://doi.org/10.18653/v1/2020.coling-main.308.
Redmon et al. 2016 Redmon, J. et al. (2016) “You only look once: Unified
real-time object detection”,
Proceedings of the IEEE conference on computer vision and pattern recognition,
IEEE, 2016. Las Vegas, NV, USA, 26 June-1 July.
https://doi.org/10.1109/CVPR.2016.91.
Rothacker et al. 2015 Rothacker, L. et al. (2015) “Retrieving cuneiform
structures in a segmentation-free word spotting framework”,
Proceedings of the 3rd international workshop
on historical document imaging and processing, ACM, 2015. Nancy, France, 22 August. pp. 129-136.
https://doi.org/10.1145/2809544.2809562.
Rusakov et al. 2019 Rusakov, E. et al. (2019) “Generating cuneiform
signs with cycle-consistent adversarial networks”,
Proceedings of the 5th international workshop on historical
document imaging and processing, ACM, 2019. Sydney, Australia, 20-21 September. pp. 19-24.
https://doi.org/10.1145/3352631.3352632.
Rusakov et al. 2020 Rusakov, E. et al. (2020) “Towards query-by-expression
retrieval of cuneiform signs”,
Proceedings of the 17th international conference on frontiers in handwriting
recognition, IEEE, 2020. Dortmund, Germany, 7-10 September. pp. 43-48.
https://doi.org/10.1109/ICFHR2020.2020.00019.
Sommerschield et al. 2023 Sommerschield, T. et al. (2023) “Machine
learning for ancient languages: A survey”,
Computational Linguistics, 49(3), pp. 1-44.
https://doi.org/10.1162/coli_a_00481.
Streck 2010 Streck, M.P. (2010) “Großes Fach Altorientalistik: Der Umfang des
keilschriftlichen Textkorpus”, Mitteilungen der Deutschen Orient-Gesellschaft, 142, pp. 35-58.
Taylor 2015 Taylor, J. (2014) “Wedge order in cuneiform: A preliminary survey”,
in Devecchi, E., Müller, G.G.W., and Mynářová, J. (eds) Current research in cuneiform palaeography: Proceedings of the
workshop organised at the 60th rencontre assyriologique internationale, Warsaw, Poland, 2014, pp. 1–30. Gladbeck, Germany: PeWe-Verlag.
Wagensonner 2015 Wagensonner, K. (2015) “On an alternative way of capturing
RTI images with the camera dome”, CDLN, 2015(1), pp. 1-12.
Wevers and Smits 2019 Wevers, M. and Smits, T. (2020) “The visual digital
turn: Using neural networks to study historical images”,
Digital Scholarship in the Humanities, 35(1),
pp. 194-207.
https://doi.org/10.1093/llc/fqy085.
Yamauchi et al. 2018 Yamauchi, K., Yamamoto, H., and Mori, W. (2018)
“Building a handwritten cuneiform character image set”,
Proceedings of the 11th
international conference on language resources and evaluation, ACL, 2018. Miyazaki, Japan, 7-12 May. pp. 719-722.
Available at:
https://aclanthology.org/L18-1115.